近年来,随着自动驾驶技术的不断发展,越来越多的汽车制造商开始推出各种自动驾驶方案,其中包括理想汽车最新发布的通勤NOA(NavigateonAutopilot)。这项基于大模型的城市自动驾驶方案在市场上引起了广泛关注。

然而,最近有网友反映在使用理想汽车在高速行驶使用NOA功能时遇到了问题,引发了人们对通勤NOA的安全性的疑问。
理想汽车NOA无法识别施工障碍物
在某社交媒体上,北京理想L7车主9月4号在社交帐号上反应理想L7的高速NOA发生故障。在高速公路上遇到了弯道施工,然而高速NOA无法识别到施工区域中的直接障碍物,导致车辆无法正确躲避,与障碍物发生碰撞。
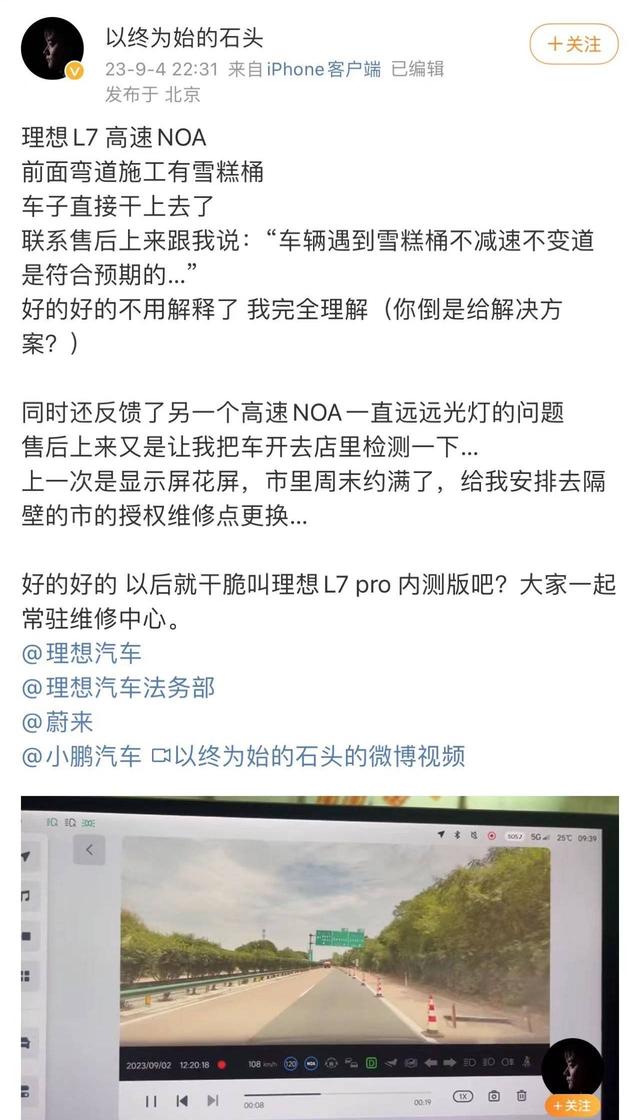
理想汽车售后方面给出的回复是辅助驾驶系统有局限性,无法识别装桶护栏、倒流牌、水马等障碍物。这种解释表明理想汽车承认通勤NOA在特定情况下可能存在识别障碍物的困难。









