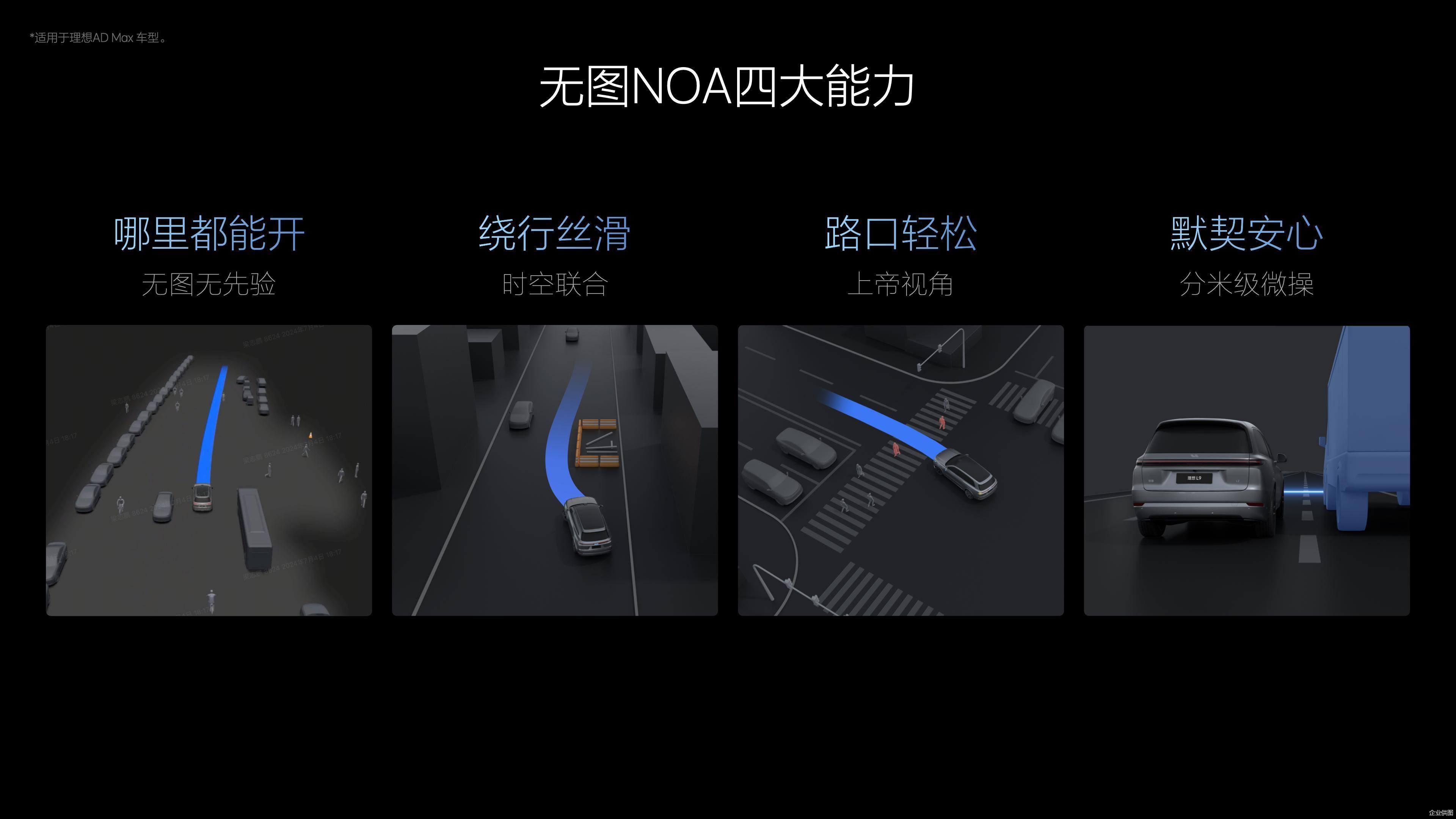
值得一提的是,在复杂的城市路口,无图NOA的选路能力也得到显著提升。无图NOA采用BEV视觉模型融合导航匹配算法,实时感知变化的路沿、路面箭头标识和路口特征,并将车道结构和导航特征充分融合,有效解决了复杂路口难以结构化的问题,具备超远视距导航选路能力,路口通行更稳定。

此外,无图NOA重点考虑用户心理安全边界,用分米级的微操能力带来更加默契、安心的行车体验。通过激光雷达与视觉前融合的占用网络,车辆可以识别更大范围内的不规则障碍物,感知精度也更高,从而对其他交通参与者的行为实现更早、更准确的预判。得益于此,车辆能够与其他交通参与者保持合理距离,加减速时机也更加得当,有效提升用户行车时的安全感。









