|

说道机器人相信每个人都不会陌生,目前上演的《变形金刚2》相信一定吸引了每个人的眼球,但是在现实世界中的机器人到底是什么样子的呢?实际上,机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。近日嘉实多为了可以成产出高品质的机油设计完成了一个摩托车机器人。
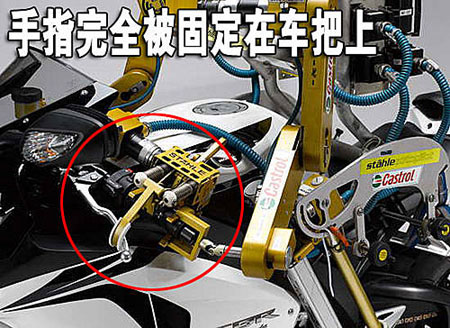
大家都知道,油料的研发也需要不断的测试,而嘉实多设计的这个机器人可以重复人无法完成的数百次数千次的动作,包括加油,换挡,起步等等,从而提取油料燃烧的数据,包括在各个环节是否是充分燃烧,对车子的影像,最终帮助生产更好,更高效的油产品。

机器人一般由执行机构、驱动装置、检测装置和控制系统等组成。执行机构即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。

机器人控制系统有两种方式。一种是集中式控制,即机器人的全部控制由一台微型计算机完成。另一种是分散(级)式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时,主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力(力矩)控制。 |
